Dismantle your 3D printed fingers from the mounts and thread through the fishing wire, leaving a tail at the end to make sure you can connect it to the servo. Fasten the fishing wire to the tip of the finger with the hot glue. Next mesure apoximately two 1.5 cm sheets of plastic board for each joint in the finger. place one end of the two plastic boards in the grove of one side of the joint. Glue them in place and do the same on the other side of the joint. the result should look like this:

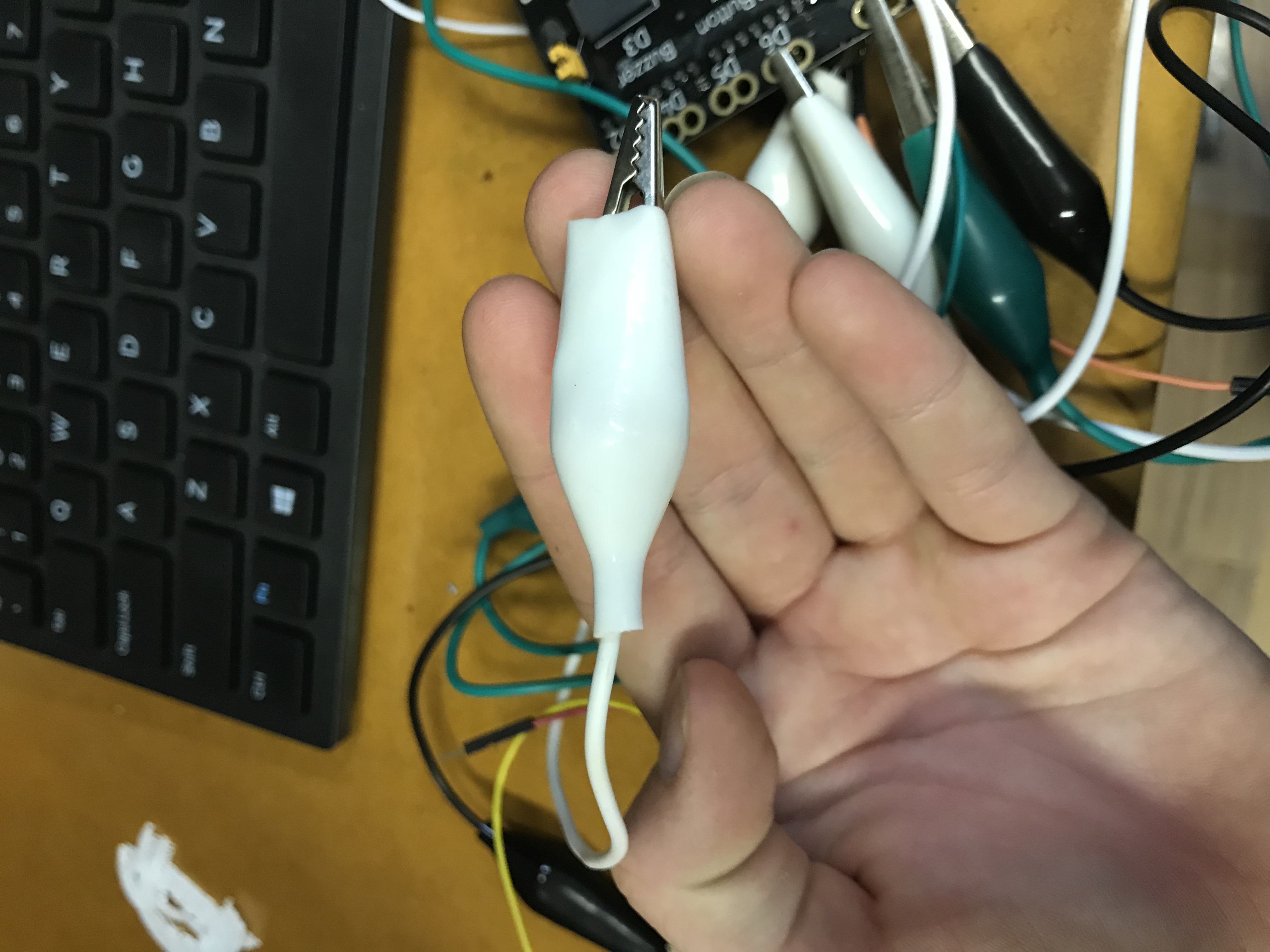
By wiring up the arduido and connecting it to the right ports with the alegator clips, you can use the program to make the arduino send you back data from the sensort to test them and you can also use the program to make the sensors such as the servo move.see the alegator clips and o the lay out of the alegaort clips below:
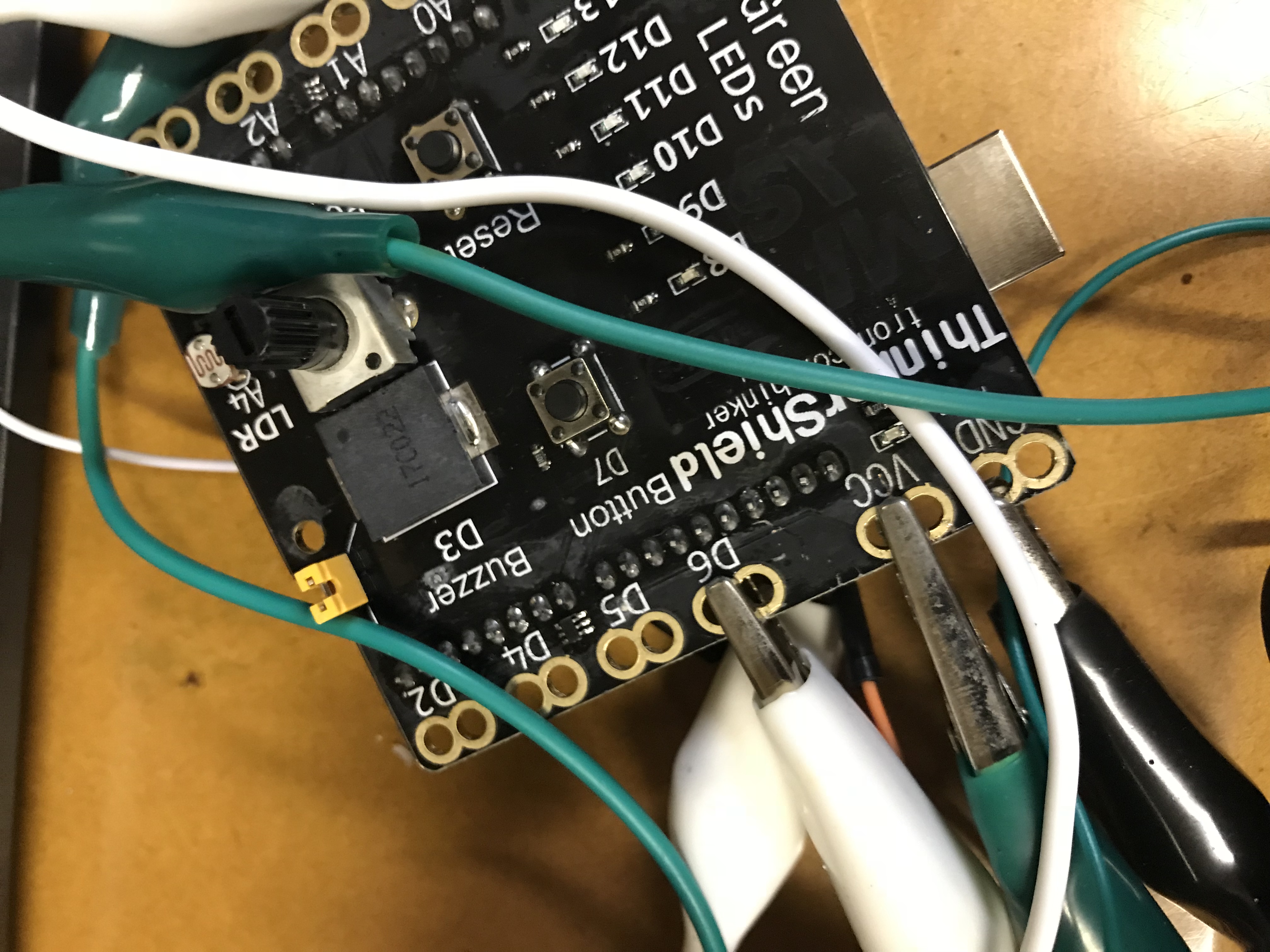
look at the pin board and connect the conection wires to pins on the pin board as seen below and as programed by your code.
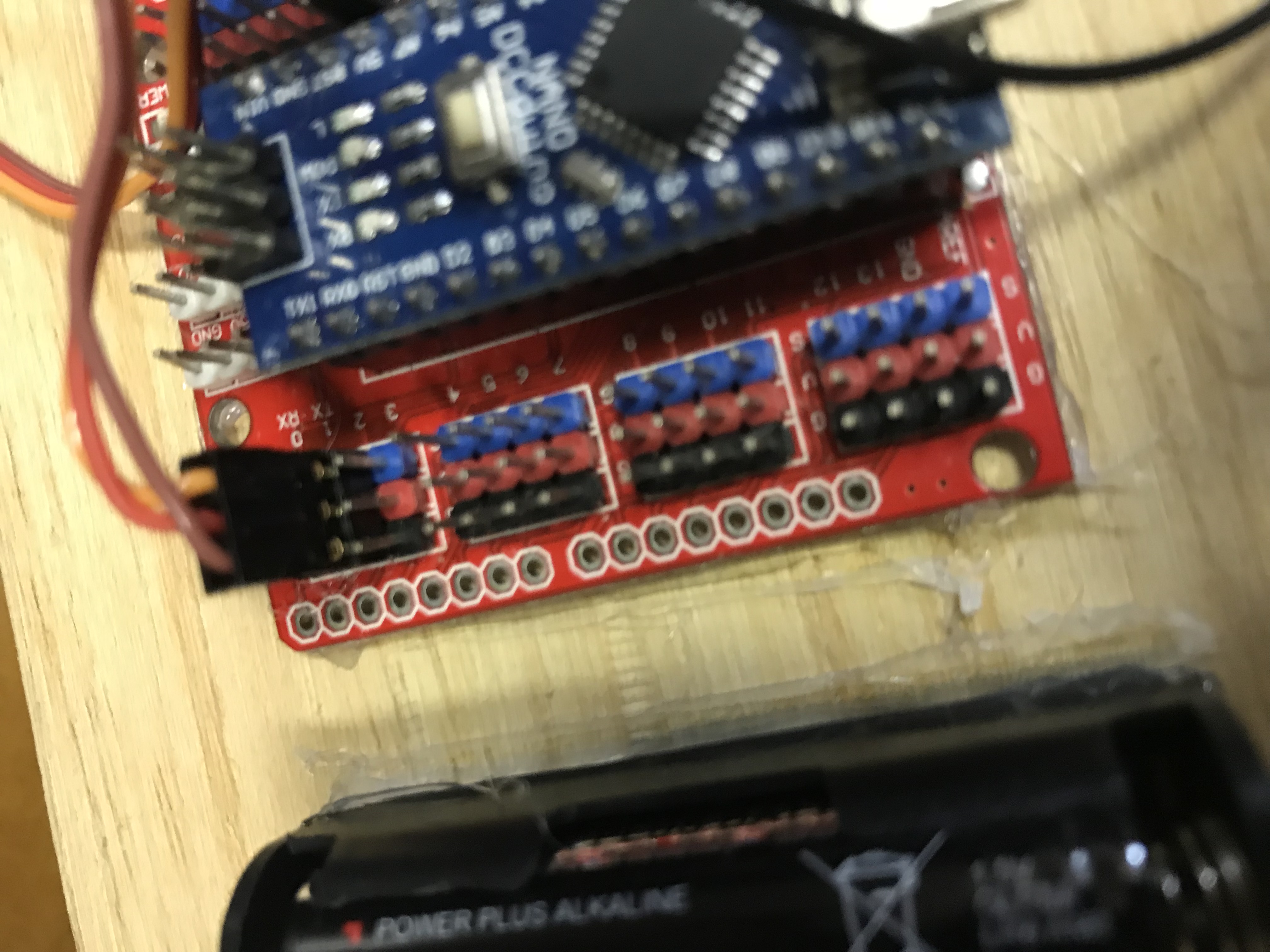
Now take the separate parts and glue them onto the board to give the project a sense of order and ease of location. See below how to lay out your different materials.

To finalise the finger, use trial and error with the number you divide by in the code equation (more on this in the code explanation). Once your finger and your sensor bend at the same angle you have succeded!
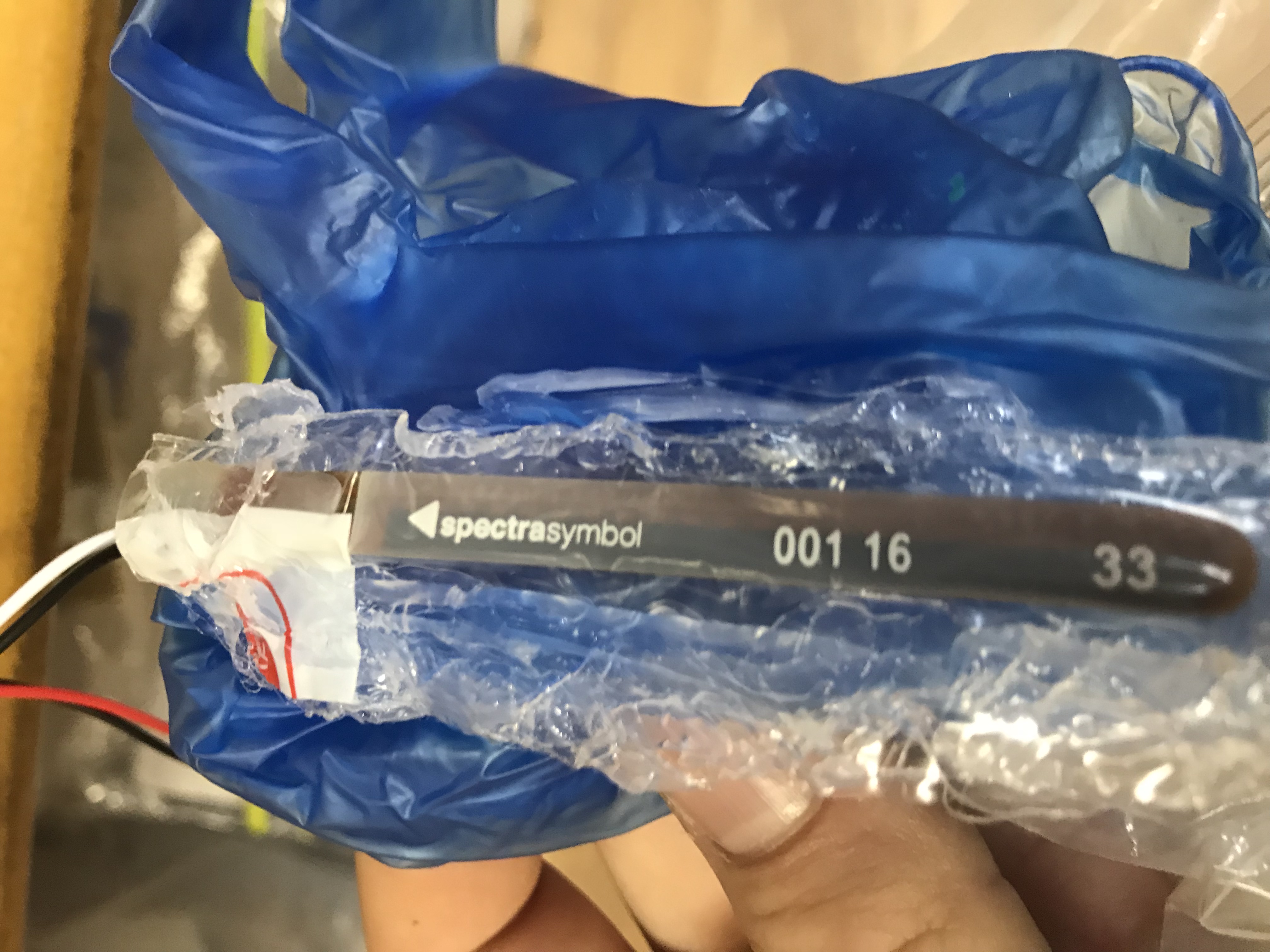
To glue on the glove i cut out a small strip off the corner of a zip lock bag. I then slid the sensor inside and glued all of the sides shut, effectively keeping it in a sleeve to protect the sensor from glue. Next, glue the sleve onto the glove as seen below.